3D MACHINE VISION 3차원 좌표 평면 상에 이미지 취득 과정을 겨쳐, 분석이 어려운 깊이 및 방향 정보를 분석합니다. 부품의 돌출 및 함몰, 자유 곡선 현상을 정의할 수 있어 실시간 3차원 외형 형상 검사가 가능합니다.
스테레오 카메라 방식
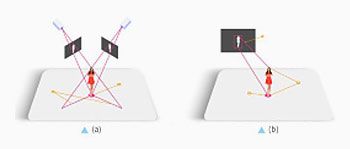
스테레오 카메라 방식1
다수의 카메라를 다양한 사진이나 각도에서 2D 이미지를 캡쳐하여 이미지 간의 픽셀 좌표 차이로부터 제품의 3D 영역을 캡쳐하는 방식

스테레오 카메라 방식2
하나의 2D 카메라와 하나의 레이저 스캐너를 결합하여 부피와 같은 3D정로를 캡쳐하는 방식
RGB-D 기반 3D MACHINE VISION
- 실시간 깊이 카메라률 사용하여 RGB고해상도 이미지에 각 화소에 일대일로 대응하는 깊이 정보를 획득
- 3차원 객체 정보를 통해 물체의 볼륨 뿐만 마니라 특정 영역 깊이 정보를 정확하게 측정
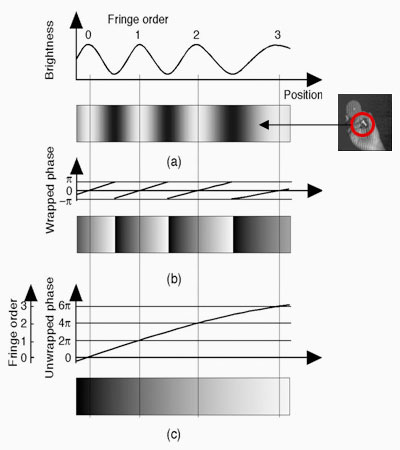
MOIRE 방식
MOIRE 방식 3D IMAGE SCAN
구현
- 일정 패턴간격을 가지는 조명 생성
- 대상물에 패턴 이미지 비추기
- 대상에 비춰진 패턴이미지를 카메라로 힉득하여
- PHASE UNWRAPPING 알고리즘 적용 3D 좌표 획득
- 3D 좌표 검사, STL등 포멧으로 출력
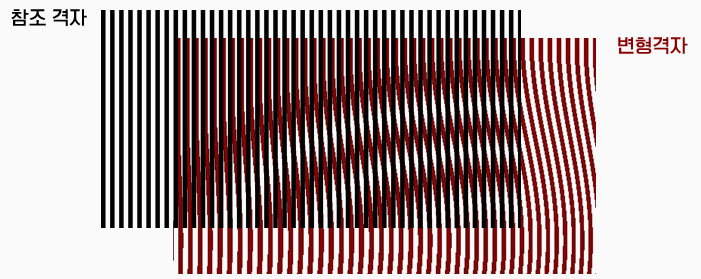
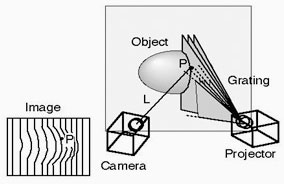
MOIRE란?
- 규칙적인 거듭된 격자간의 주기차에 의해 발생하는 간섭무늬
- 계측에 있어 MOIRE 원리를 기본 사용
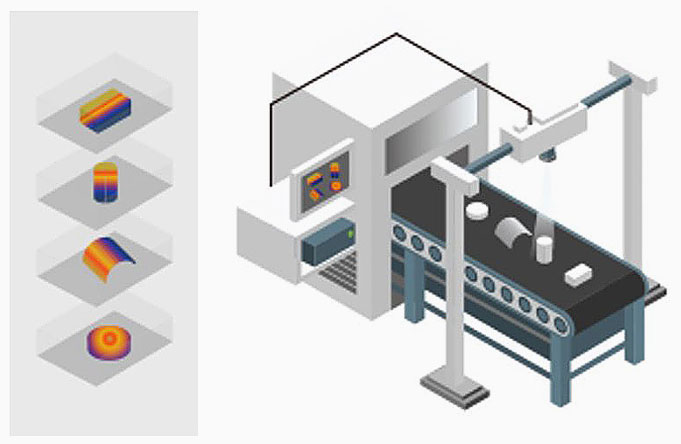
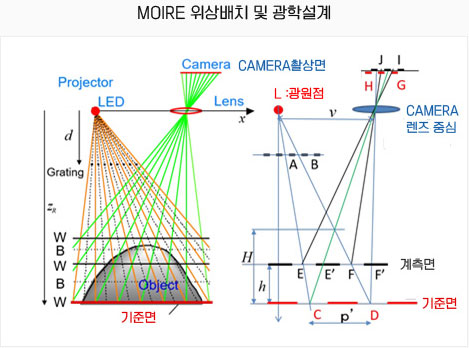
HARDWARE
간단한 구성
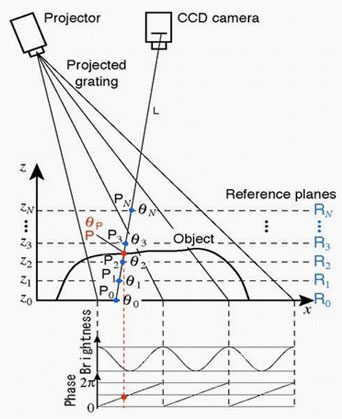
- 1. 프로젝터로 빛을 조사
- 2. 격자문양을 대상물에 투영
- 3. 카메라로 사진 활영
- 4. 획득한 영상에 대한 PC내 연산분석
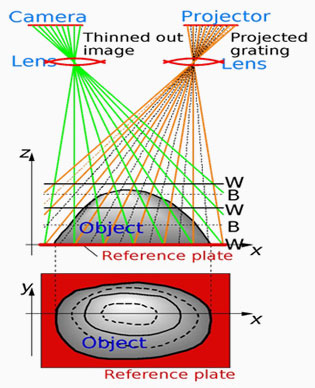
2D CAMERA로 3D SCAN을 진행
- 2D CAMERA는 2차원평면(x, y) 표현, 어떻게 (x,y,z) 가 가능 ?
- MOIRE 무늬의 휘도에서 높이 (z축)를 연산

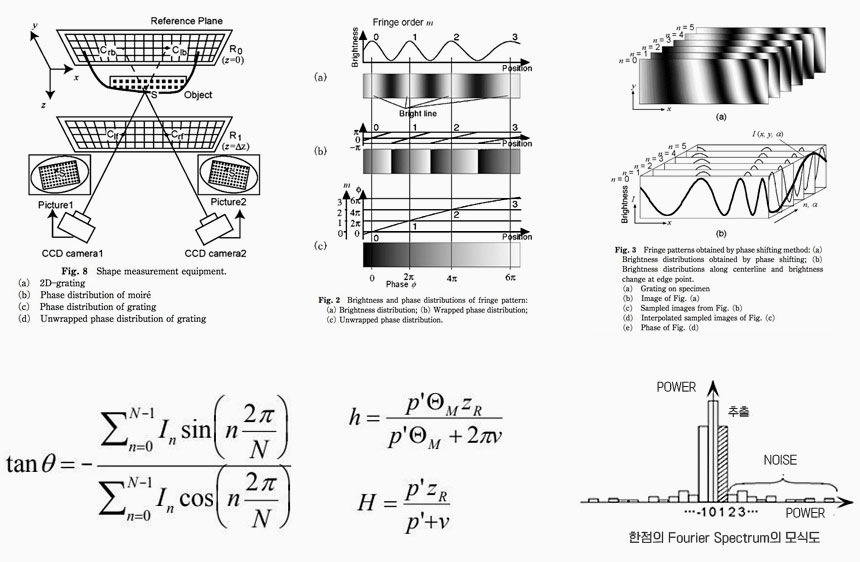
OPPA: One Pitch Phase Analysis
- 세계최고 속도를 실현한 계측방법
- 독립적으로 개발한 특허
- Setn pixels per pitch
- Set N pixels per pitch at any height
- Fourier-transform (푸리에 변환)
- Calculate the phase
- Calculate the height
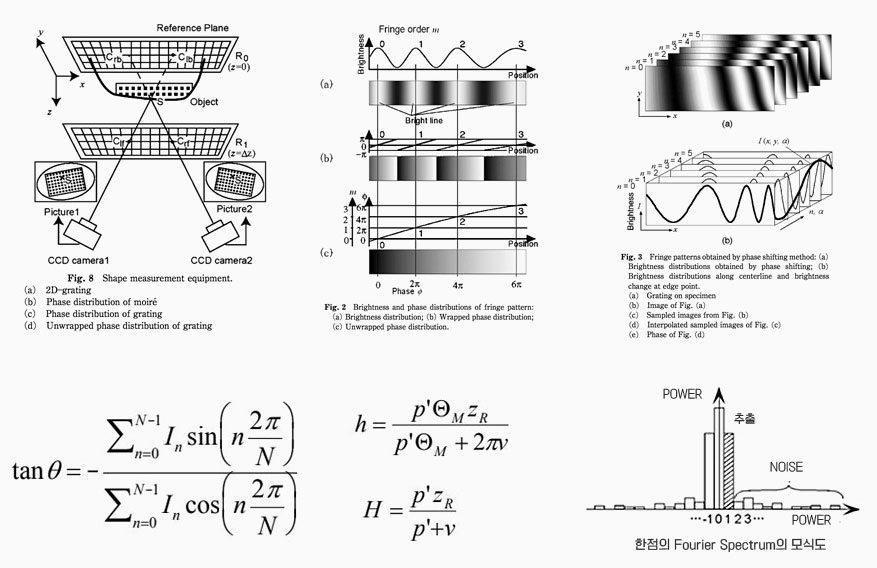
ALGORITHM 구성
- 알고리즘의 상세한 설명은 별도 문의
- 삼각측량법, Fourier변환, Spectrum해석 + α
기존 방법
- 위상 시프트방식등 기존의 방법으로는 16매〜4매의 복수의 사진이 필요함
- 복수의 사진을 활영하는 사이에 대상물이 위치변형을 일으키면 3D Scan은 할 수 없게 된다
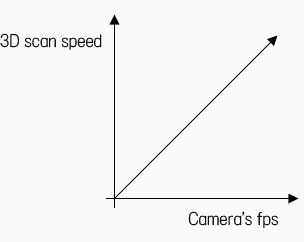
OPPA: One Pitch Phase Analysis
- 1 장의 사진만으로 3D SCAN이 가능
- 카메라의 fps(frame per second)와 3D Scan 속도률 일정하게 정비레하게 맞추어 실현가능
핵심역량
초고속 카메라와 OPPA법을 적용하여 세계 최고속도의 3D Scan을 실현하게 됨
| CATEGORY | FPS & CAMERA MAKER |
|---|---|
| 고속 카매라 |
• 50,000 fps: Fastcam • 2,000 fps: Photoron |
| 중속 카메라 |
• 750 fps: Basler • 300 fps: OmronSentech |
| 중속 카메라 |
• 750 fps: Basler • 300 fps: OmronSentech |
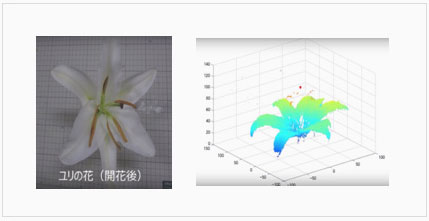
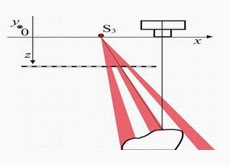
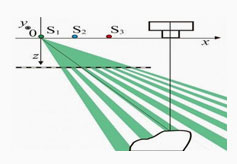
3차원 형상 스캔 for 360°
- 사각 및 정반사 영역에 있어서는 다수의 복수 카메라로 찰영 및 이에 맞추어 위상 및 Time 구분
- 다수의 방향서 획득된 영상을 한 개의 공간좌표에 3차원 배치
MULTI - CAMERA

Image 합성 - 1개의 xyz 공간좌표에 합성
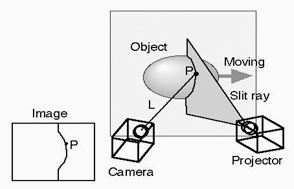
격자투영법 - 광절단법(라인투영) 비교
- 대상울에 다수의 격자를 실시간 투영하는 방법
- 광절단법에 비해 격자투영법이 속도 및 정밀도 우수항
| 광절단법 | 격자투영법 | |
|---|---|---|
|
|
|
| 투영 | 직선상의 Slit광 | 균등폭의 반복된 평행선 |
| 속도 | 1컷의 2차원 화상에 1 Line의 형상밖에 해석할 수 없으으로 시간적 효율성이 떨어진다 | 1컷의 2차원 화상일 경우에도 전면의 형상을 해석할 수 있어 처리효율이 우수하다 |
| 정도 | 보통 | 우수함 |
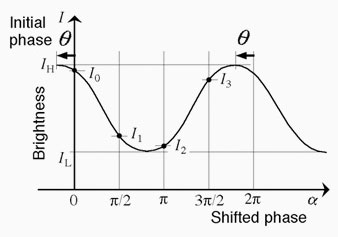
위상 시프트 (PHADE SHIFT)
- 격자의 위치를 수차례 이동하여 투영한 위상해석
- 위상에서 높미를 계산가능
- 휘도분포 (초기):
I =a cosф + b - 휘도분포 (위상Shift증):
I =a cos(ф+a) + b -
a: 진폭
ф: 초기 위상
α: 위상Shift량
b: 배경강도
LED 광원 절환 위상 Shift법
- 대상물이나 격자를 물리적으로 움직이는 것이 아닌 광원을 전기적으로 변화를 주어 고속화 하는 방법
| 기존 위상 SHIFT 기법 | 신규 개발 광원 절환법 | |
|---|---|---|
|
|
|
| 광원의 수 | 한개 | 복수 |
| 원리 | 피사체나 격자를 물리적으로 이동변화를 가한다 | LED를 전기적으로 0N/0FF하여 광원 이동방법 |
| 고속화 | 어려움 | 간단함 |
전공간의 TABLE화 방법이란
- 격자의 의상에서 테이들을 참고하는 것 만으로 계산 불필2하며 고속한가 가능하게 8
- 1개의 화소마다
위상과 X,Y,Z 의 좌표값 Table을
미리작성 - Table을 보는것 만으로
좌표값을 얻을 수 있다 - 계산 과정이 필요없어서
고속화 가능
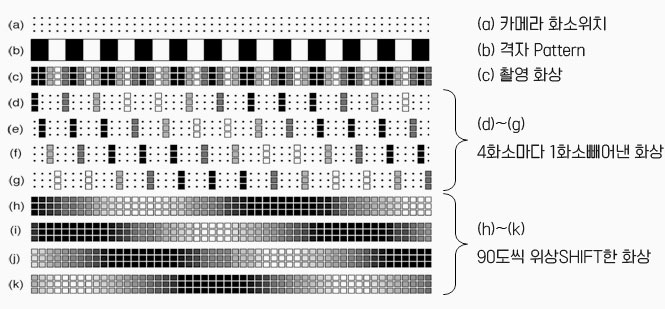
SAMPLING MOIRE법
- 격자 화상을 다운 샘플링함으로써 발생하는 모아레 무늬의 위상 해석을 하는 방법
- 기존의 방법으로는 복수의 사진이 필요하지만 1매의 화상 만으로 변위, 변형, 응력 등을 실시간으로 계측 가능하게 함
- 이미지상관법 (DIC) 이 필요하지 않음